Мехатронный комплекс для исследования алгоритмов адаптивного управления (ШкРоБ-2)
10 Мая 2012
 Создание робота - это не только забава. Ведь робот является отличным пособием при изучении электроники, программирования, систем управления… Гораздо интереснее изучать основы программирования на примере управления механической тележкой или манипулятором, чем в миллионный раз писать программы типа "Здравствуй мир!".
Создание робота - это не только забава. Ведь робот является отличным пособием при изучении электроники, программирования, систем управления… Гораздо интереснее изучать основы программирования на примере управления механической тележкой или манипулятором, чем в миллионный раз писать программы типа "Здравствуй мир!".
Поэтому проект по разработке робота - конструктора был одним из первых проектов нашей лаборатории.
 Идея, заложенная при создании набора-конструктора, проста: разработать несколько несложных и недорогих модулей, которые можно без пайки подключать друг к другу, создавая при этом различные электронные и электромеханические конструкции, управляемые при помощи компьютера или контроллера. Отличительной особенностью конструктора является открытость и простота интерфейса межмодульных взаимодействий.
Идея, заложенная при создании набора-конструктора, проста: разработать несколько несложных и недорогих модулей, которые можно без пайки подключать друг к другу, создавая при этом различные электронные и электромеханические конструкции, управляемые при помощи компьютера или контроллера. Отличительной особенностью конструктора является открытость и простота интерфейса межмодульных взаимодействий.
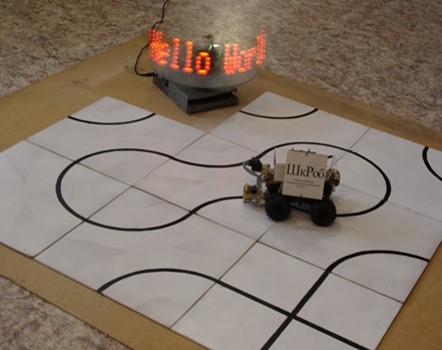 Самой простой реализацией прототипа робота является конструкция механической движущейся тележки, выполняющей несложные задачи, например по перемещению вдоль заданного направления.
Самой простой реализацией прототипа робота является конструкция механической движущейся тележки, выполняющей несложные задачи, например по перемещению вдоль заданного направления.
Более сложной конструкцией является манипулятор, обладающей несколькими степенями свободы и способный обрабатывать информацию об окружающей обстановке для того, чтобы

использовать ее в качестве обратной связи при выборе направления движения.
 Один из конструкторов робота-манипулятора - школьник 9 класса Горно-Алтайской школы-лицея Никита Алексеевич Пичугин. Он принимал участие в разработке мехатронной части робота и писал программу обработки изображений с использованием библиотеки OPEN CV.
Один из конструкторов робота-манипулятора - школьник 9 класса Горно-Алтайской школы-лицея Никита Алексеевич Пичугин. Он принимал участие в разработке мехатронной части робота и писал программу обработки изображений с использованием библиотеки OPEN CV.
 Логическим завершением Робота-манипулятора была установка его на автономно-управляемое шасси. Данный вариант конструкции робота предназначался для отладки и исследований алгоритмов автоматического управления. А задача, которая решалась аппаратно-программным обеспечением заключалась в поиске и сборе теннисных мячей в полностью автоматическом режиме.
Логическим завершением Робота-манипулятора была установка его на автономно-управляемое шасси. Данный вариант конструкции робота предназначался для отладки и исследований алгоритмов автоматического управления. А задача, которая решалась аппаратно-программным обеспечением заключалась в поиске и сборе теннисных мячей в полностью автоматическом режиме.
Данная версия Робота Манипулятора была представлена на выставке (Полностью) НТТМ 2012, где пользовалась успехом у зрителей завоевала медаль выствки.
Пока себестоимость данной реализации мехатронного робота-манипулятора достаточно высока и технология еще не настолько отработана, чтобы можно было наладить даже мелкосерийное производство. Однако простота, заложенная в конструкции и широкая распространенность комплектующих позволяют повторить данный проект как в школьных кружках, так и в домашних условиях. А как показал опыт, готовый прототип перемещающегося на механической тележке манипулятора может быть очень хорошим полигоном как для программистов так и для людей умеющих или только обучающихся держать паяльник.